|
|
| Line 5: |
Line 5: |
| | | | |
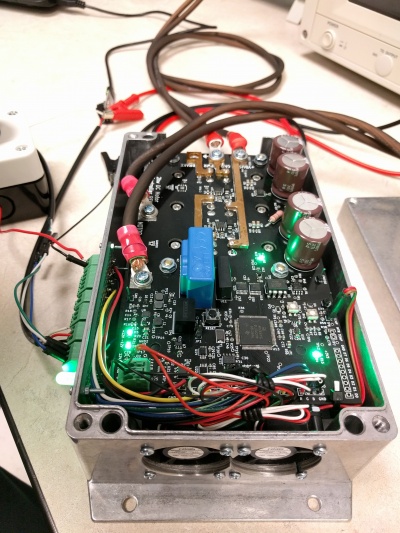
| | [[File:2kw-motor-controller-running.jpg|400px]] | | [[File:2kw-motor-controller-running.jpg|400px]] |
| − |
| |
| − |
| |
| − |
| |
| − | ''' Motor Controller Specifications '''
| |
| − | {|
| |
| − | | Maximum continuous current || 90 amps
| |
| − | |-
| |
| − | | Maximum transient current || Configurable / application specific
| |
| − | |-
| |
| − | | Maximum motor voltage || 65 amps
| |
| − | |-
| |
| − | | Maximum power output || 5.8 kw (estimated)
| |
| − | |-
| |
| − | | Controller operating voltage || 6 - 9V
| |
| − | |-
| |
| − | | Controller operating current (max) || 400 mA
| |
| − | |-
| |
| − | | Communication interfaces || CAN, UART
| |
| − | |-
| |
| − | | Programming interface || JTAG
| |
| − | |-
| |
| − | | Current control || Yes
| |
| − | |-
| |
| − | | Velocity control || Yes
| |
| − | |-
| |
| − | | Position control || No
| |
| − | |-
| |
| − | | Thermal protection || Yes
| |
| − | |-
| |
| − | | Overcurrent protection || Yes
| |
| − | |-
| |
| − | | Battery voltage monitoring || Yes
| |
| − | |}
| |
| − |
| |
| − |
| |
| − |
| |
| − | ''' Power ratings '''
| |
| − |
| |
| − | The 2 kilowatt designation refers to the maximum power output when using a 24V power supply. The motor controller is designed to operate at up to 65V, at which point it should be capable of delivering about 5.8 kW to a motor. However, it has not been tested at voltages above 24V.
| |
| − |
| |
| − |
| |
| − | ''' Maximum current ratings'''
| |
| − |
| |
| − | You can configure the thresholds for the maximum average current and maximum instantaneous current which will cause a fault. It is not recommended to set the maximum average current limit beyond 90A. It is ''probably'' safe to run short transient currents of much more than 90A (e.g. 150A for some tens of milliseconds at motor startup), but no testing has been done of this kind of operation and no guarantees are made about the safety of doing so.
| |
| | | | |
| | == Design Files == | | == Design Files == |
Revision as of 23:21, 2 December 2017
Introduction
The 2 kilowatt DC Motor Controller provides torque and velocity control of large brushed DC motors. The device can be configured and commanded over a CAN bus. Additionally, sensor feedback over CAN can be performed automatically at 100 Hz or asynchronously upon request. The motor controller protects itself against overcurrent and overheating faults. If a temperature probe mounted on the motor is connected, the motor controller will protect against the motor overheating as well.
Design Files
The design files are on Github: [1]
Instructions
