Control P3-DX in Gazebo
This section will show you how to control a simulated Pioneer 3-DX fitted with a laser scanner and an RGBD Sensor.
Packages Needed
- native — This package contains all of the launch files needed to test and run NATIVE.
- PioneerModel — Contains a model of the Pioneer 3-DX and a means of interfacing this model with Gazebo.
- turtlebot_description — Contains a model of an RGBD sensor and a means of interfacing with this model.
Procedure
Take note of your IP address of your computer. Ensure that it is indeed connected to a network.
Simply type the following into your terminal:
roslaunch native pioneer_simulation.launch.
This command opens Gazebo with a classroom-like environment, as shown in Figure 2.1, with a Pioneer 3-DX fitted with a hokyuo laser and a Microsoft Kinect.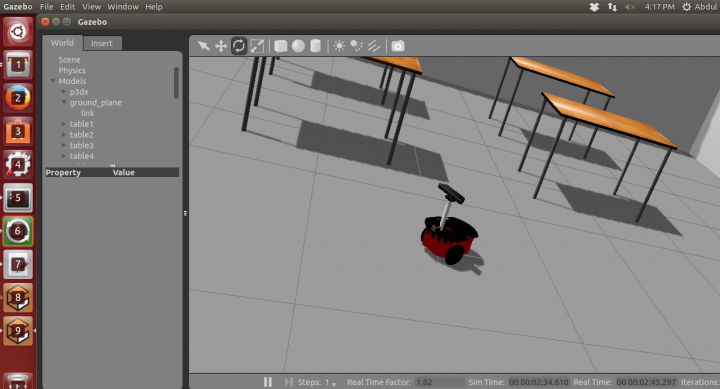 Gazebo Simulator with Pioneer 3-DX
Gazebo Simulator with Pioneer 3-DX
Open ARC application on your Android phone or tablet. Enter your IP address and keep the Port Number to 2362. For example, if your IP address is 192.168.2.1, Figure 2.2 is how the ARC looks when configured.
When you have added your IP address and ensured that the Port Number is correct, press OPEN PORT and you should have created a connection from the ARC to your computer.
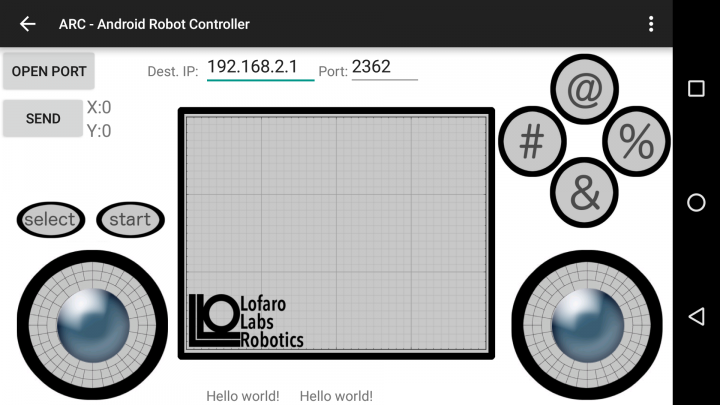 ARC with Destination IP Entered
ARC with Destination IP EnteredNow, you can control the simulated Pioneer 3-DX using the joysticks.
, simply press the select key on ARC.

